















DIY: Arduino Robotic Arm
Φτιάξτε ένα ρομποτικό χέρι με τη βοήθεια ενός Arduino. Φτιάξτε ένα ρομποτικό χέρι με τη βοήθεια ενός Arduino.
Στο σημερινό DIY θα φτιάξουμε ένα ρομποτικό χέρι με τη βοήθεια ενός Arduino Nano, τριών MG996R servos, ένα Micro servo και ένα ζευγάρι joysticks δύο αξόνων. Επιπρόσθετα για το πειραματικό αυτό project θα χρειαστούμε breadboard, προαιρετικά ένα PCB, αποστάτες με αντίστοιχες βίδες, 6V voltage regulator και μια μπαταρία.
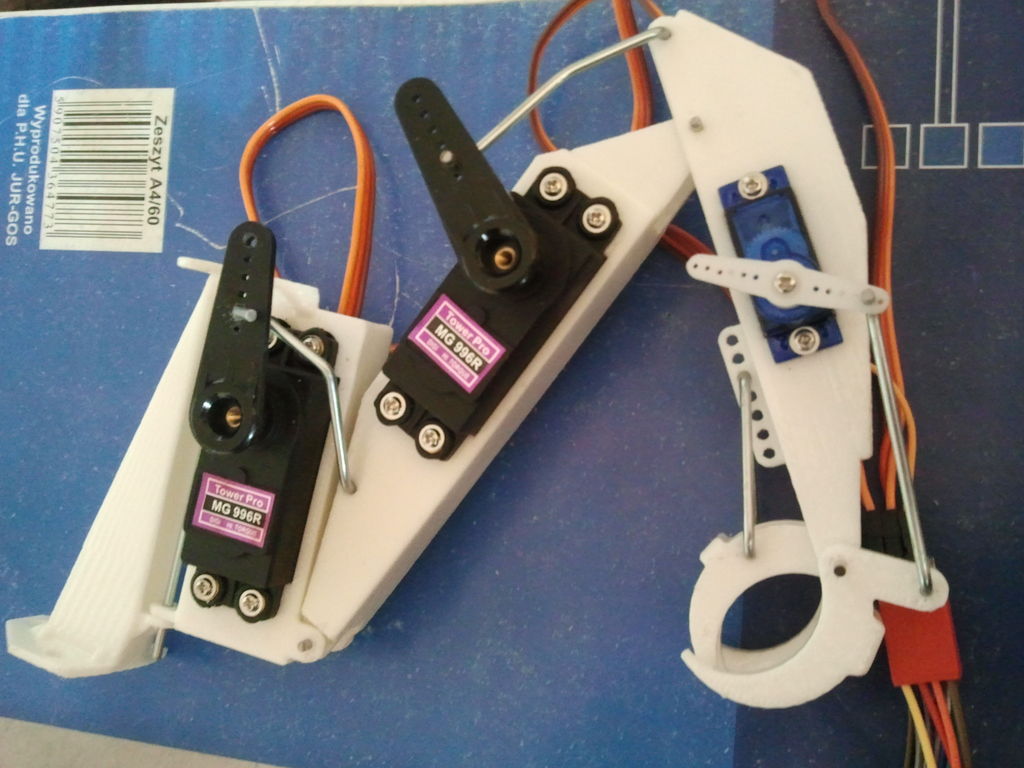
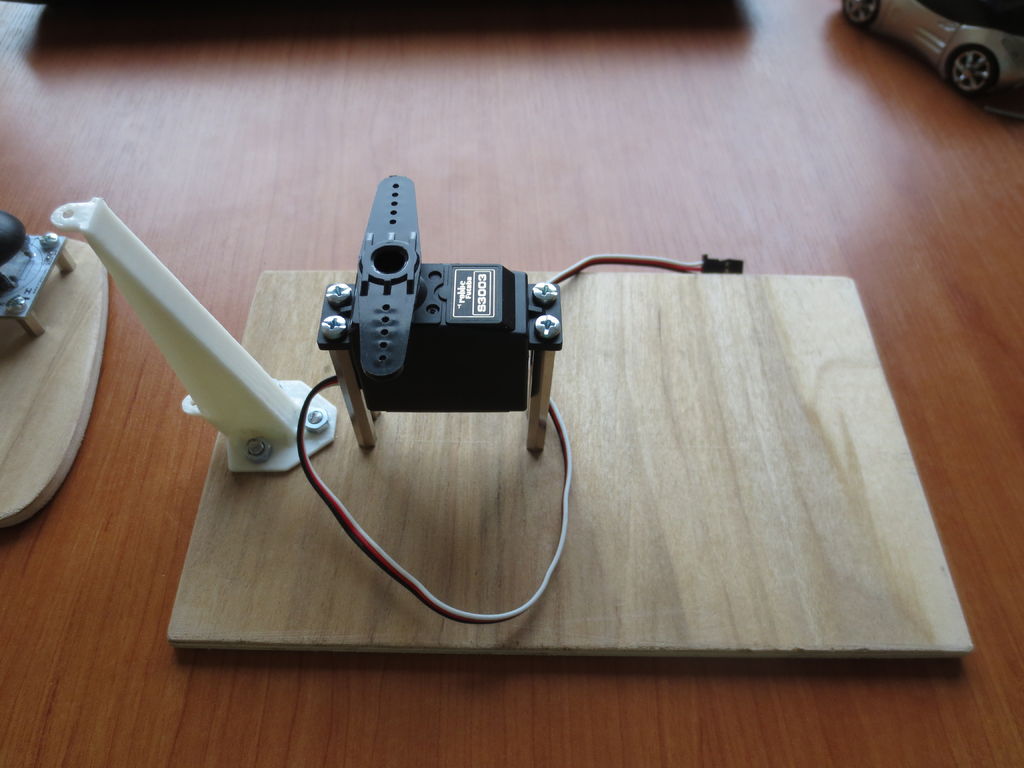
Βήμα 2. Αφού εκτυπώσουμε τα τμήματα που απαρτίζουν το ρομποτικό χέρι, ξεκινάμε τη συναρμολόγηση και εγκαθιστούμε τα servos.




[video=youtube;33vRmf5lKlc]https://www.youtube.com/watch?v=33vRmf5lKlc[/video]
Στο σημερινό DIY θα φτιάξουμε ένα ρομποτικό χέρι με τη βοήθεια ενός Arduino Nano, τριών MG996R servos, ένα Micro servo και ένα ζευγάρι joysticks δύο αξόνων. Επιπρόσθετα για το πειραματικό αυτό project θα χρειαστούμε breadboard, προαιρετικά ένα PCB, αποστάτες με αντίστοιχες βίδες, 6V voltage regulator και μια μπαταρία.
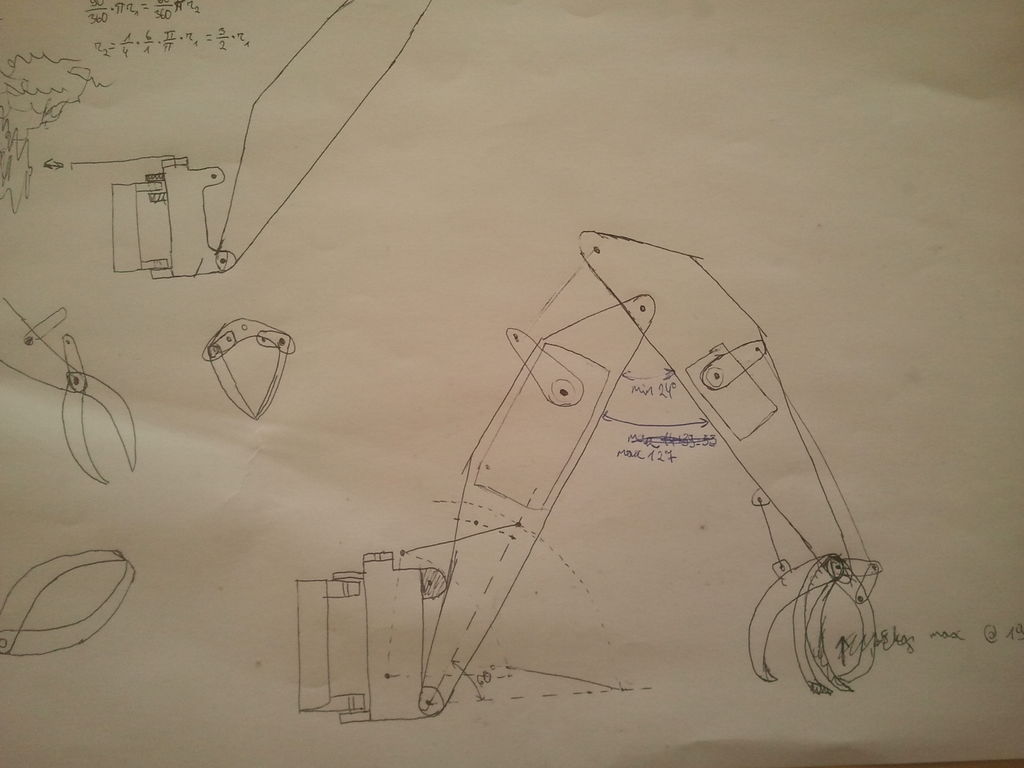
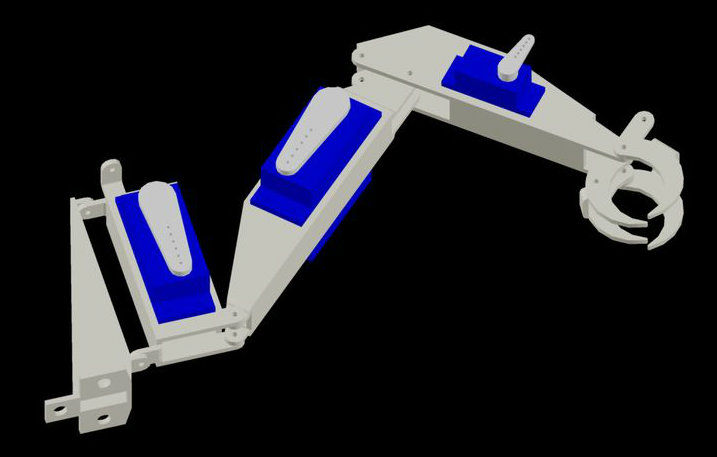
Βήμα 1. Το πρώτο βήμα είναι η σχεδίαση του χεριού. Προτείνεται να το σχεδιάσετε σε κάποιο CAD πρόγραμμα καθώς το αρχείο μπορεί να χρησιμοποιηθεί από συστήματα 3D printing. Τα τμήματα του χεριού υπάρχουν στην πηγή του DIY.
Βήμα 2. Αφού εκτυπώσουμε τα τμήματα που απαρτίζουν το ρομποτικό χέρι, ξεκινάμε τη συναρμολόγηση και εγκαθιστούμε τα servos.
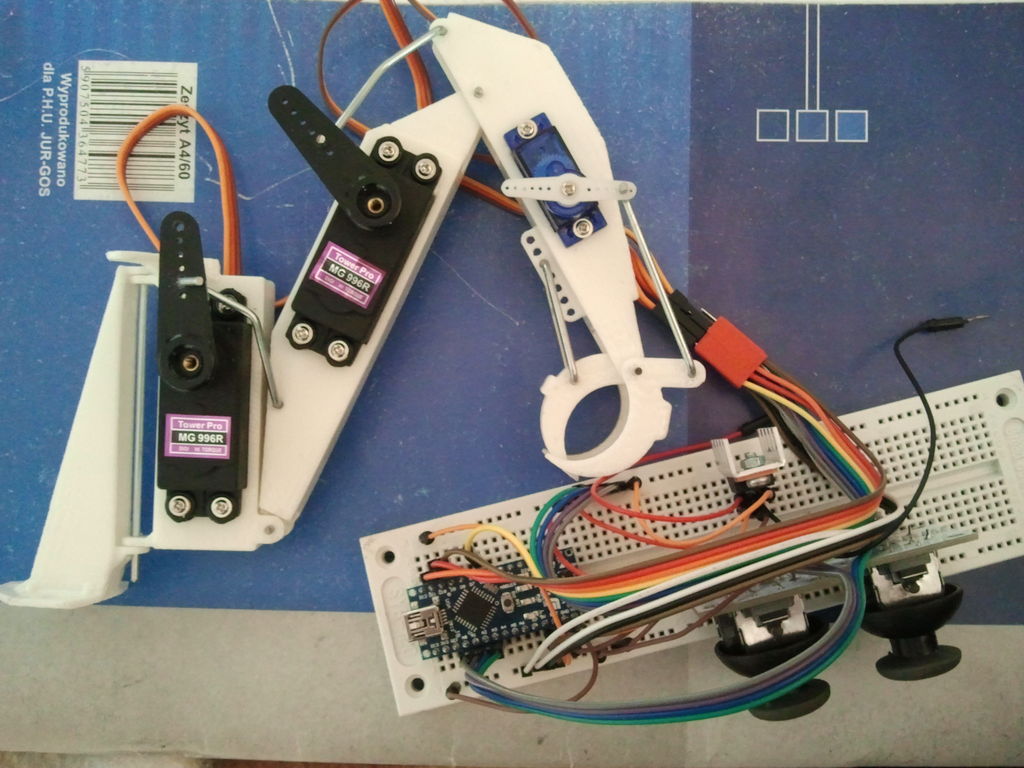
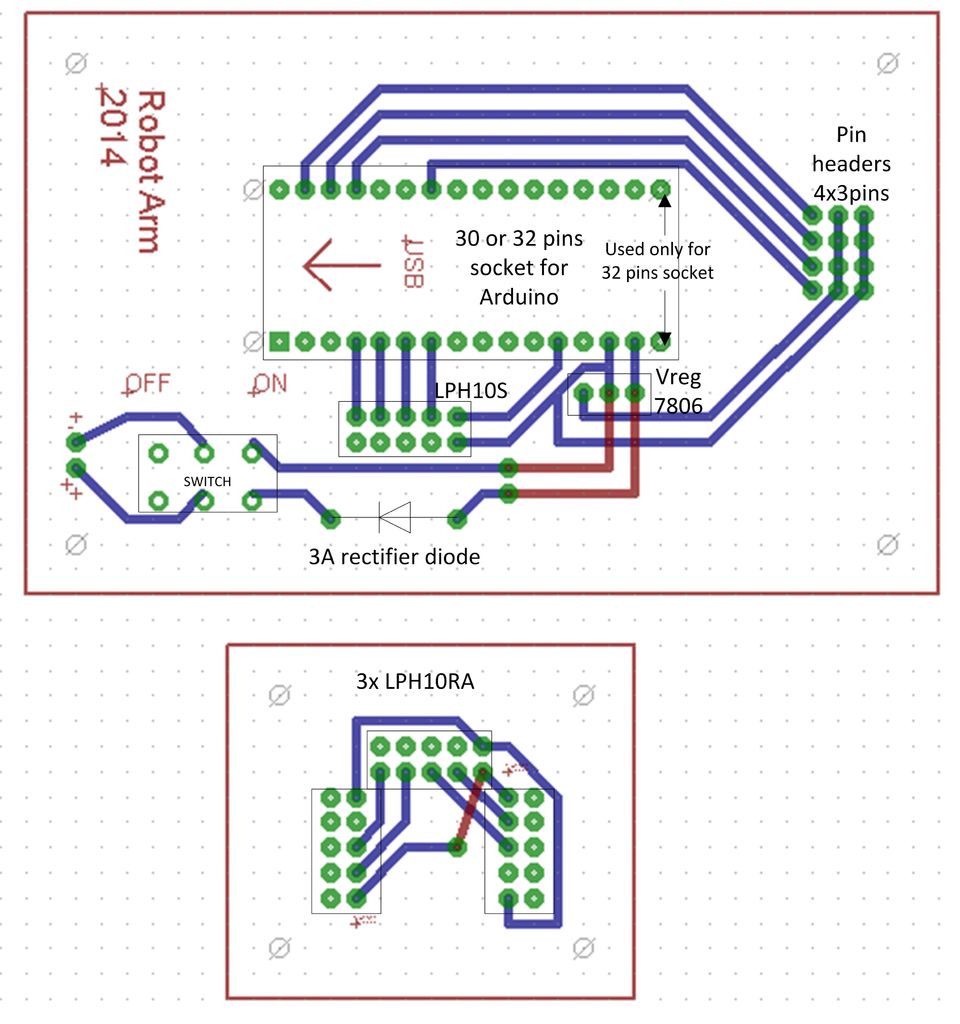
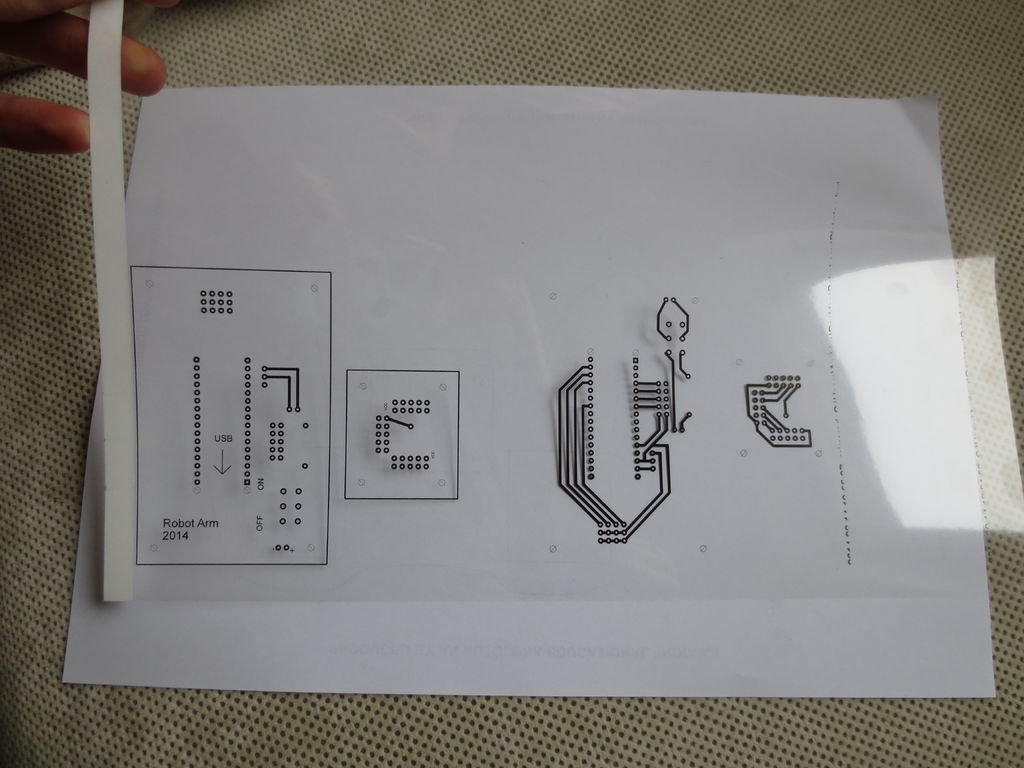
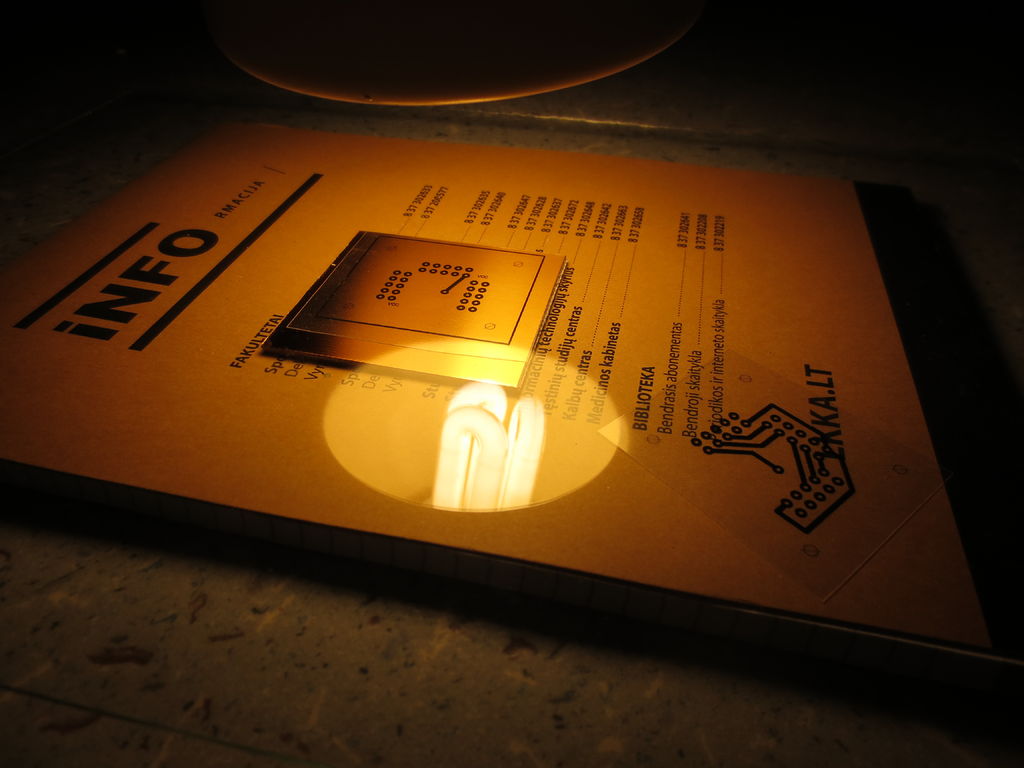
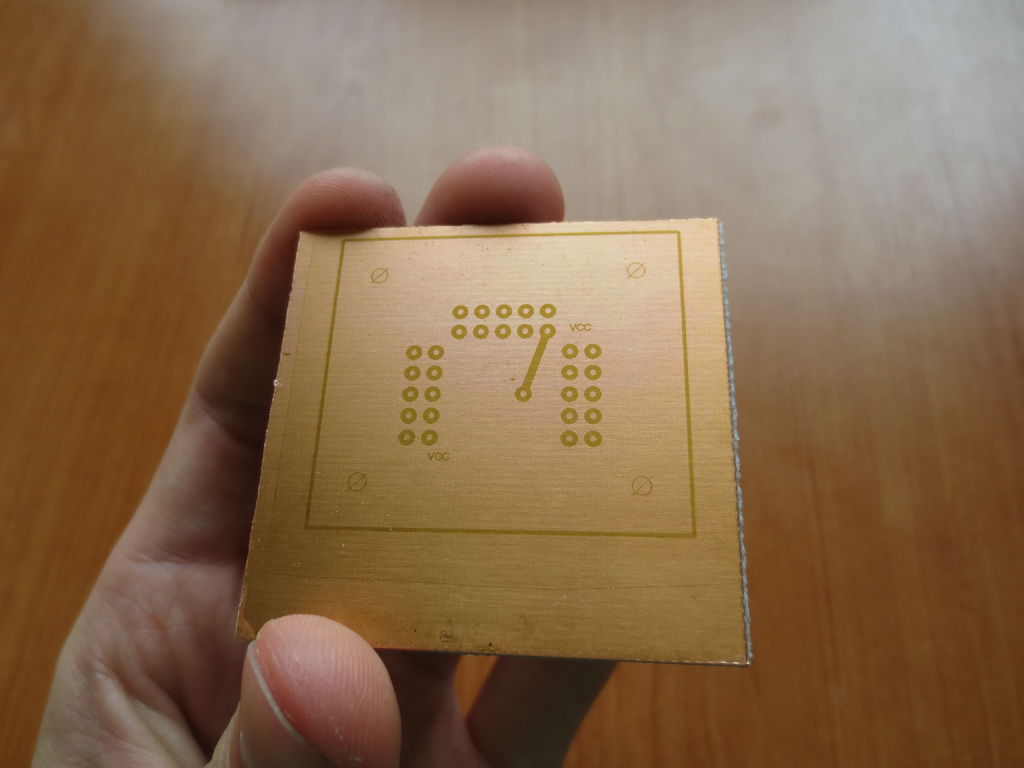
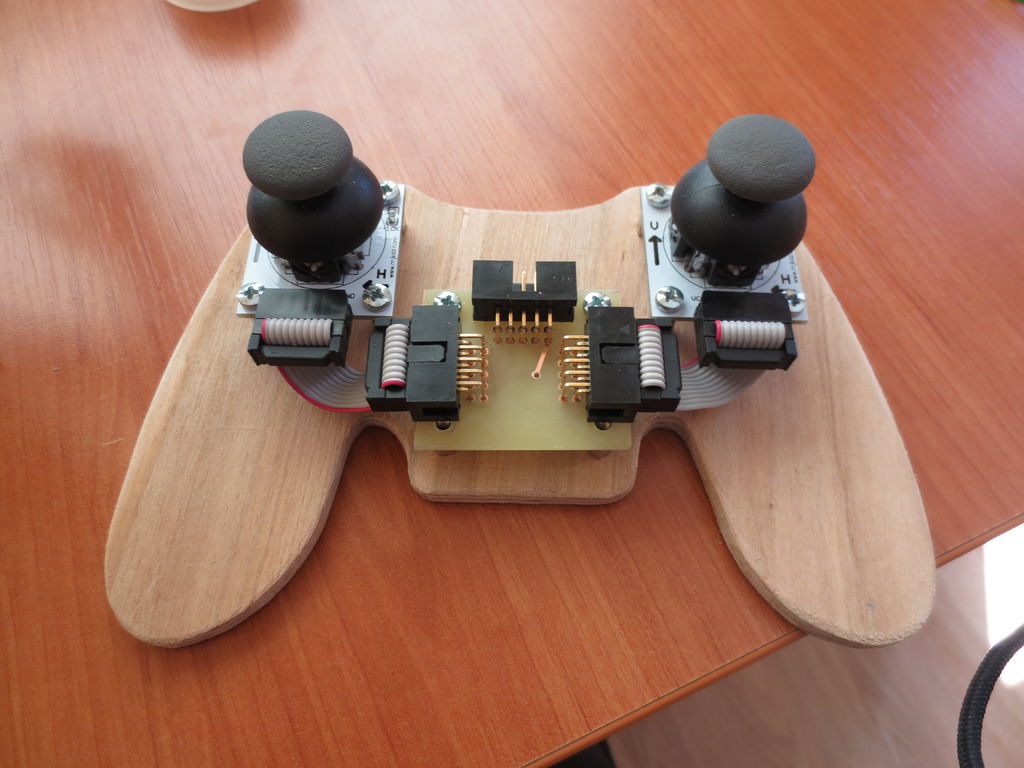
Βήμα 3. Σε αυτό το βήμα θα συνδέσουμε τα servos του χεριού με το κύκλωμα και τα joysticks ουσιαστικά για να δοκιμάσουμε το project μας ακολουθώντας το σχεδιάγραμμα. Ο κώδικας του project για το Arduino υπάρχει εδώ, ενώ εάν θελήσετε να αναπτύξετε και PCB το σχετικό αρχείο εδώ.
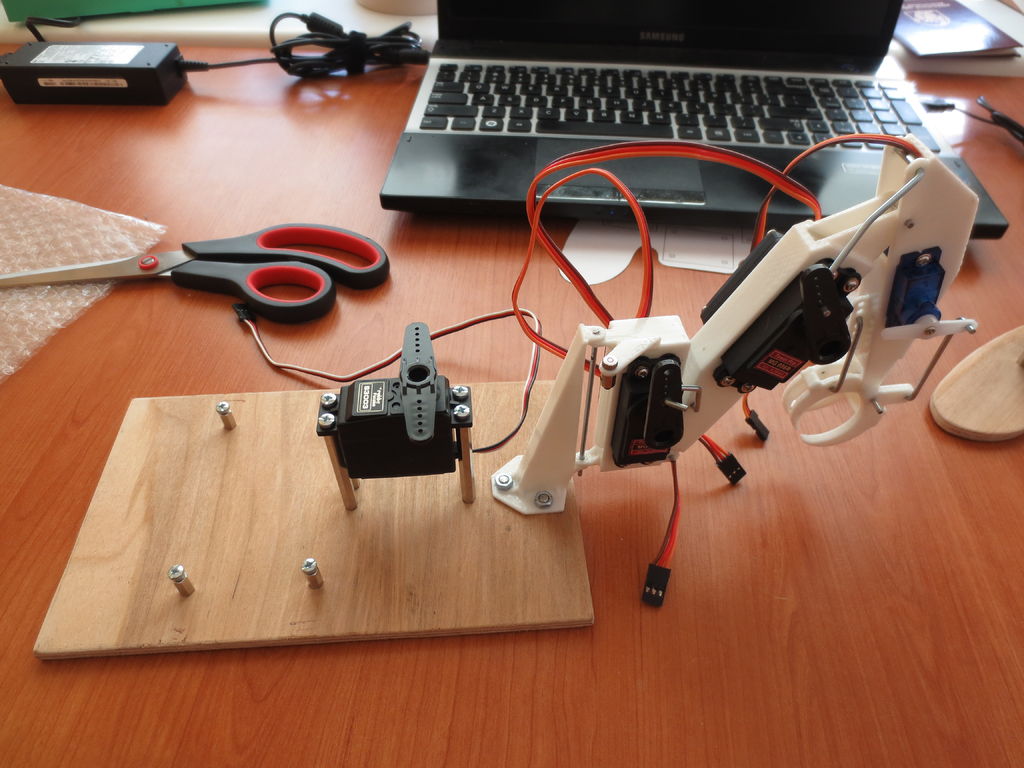
Βήμα 4. Αφού τελειοποιήσουμε το κύκλωμά μας, παίρνουμε δύο κομμάτια ξύλο κόντρα πλακέ για να τοποθετήσουμε τα ηλεκτρονικά. Το ίδιο ξύλο θα λειτουργήσει και ως βάση για το ρομποτικό χέρι.
[video=youtube;33vRmf5lKlc]https://www.youtube.com/watch?v=33vRmf5lKlc[/video]