















DIY: T.A.P BOT (Touch Assist Player)
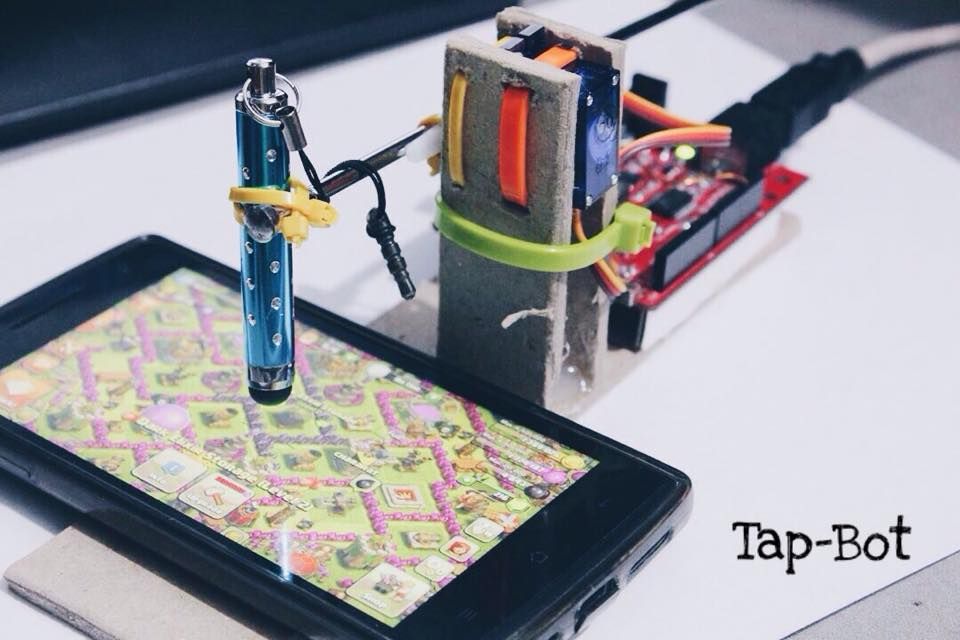
Δημιουργήστε ένα ρομπότ το οποίο θα πατάει την οθόνη του smartphone σας αυτόματα! Δημιουργήστε ένα ρομπότ το οποίο θα πατάει την οθόνη του smartphone σας αυτόματα!
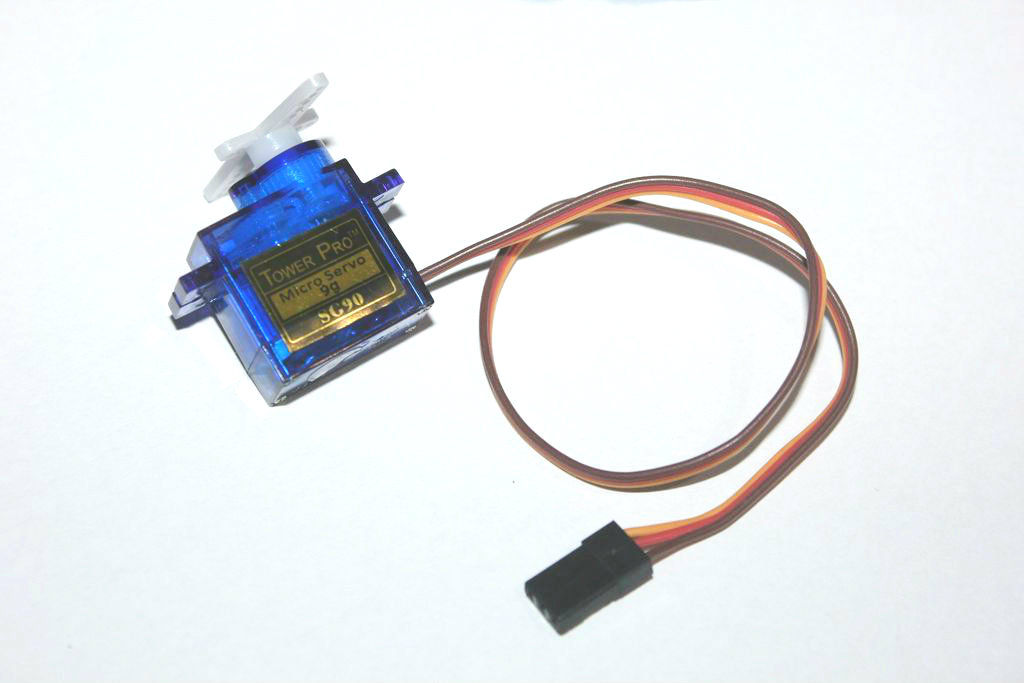
Κάτι ιδιαίτερα χρήσιμο όχι μόνο στα παιχνίδια που περιγράφονται στο εν λόγω DIY, αλλά και σε διάφορες άλλες εργασίες και το μόνο εμπόδιο είναι η φαντασία του εκάστοτε ανθρώπου. Ο κύριος σκοπός του, είναι να διατηρεί κάποιο game ενεργό στο smartphone, ενώ θα μπορούσε να χρησιμοποιηθεί για να ανοίγει/κλείνει διάφορους διακόπτες, σε συγκεκριμένη χρονική στιγμή, κάτι που μπορεί να ρυθμιστεί μέσω του Arduino στο οποίο και βασίζεται. Αρχικά, εφόσον το DIY προορίζεται για χρήση με smartphone, θα χρειαστούμε κάτι το οποίο θα μπορεί να λειτουργήσει στην capacitive οθόνη αφής του τηλεφώνου, εκτός από τα standard, που είναι το servo μοτέρ, το Arduino, μερικά καλώδια, μερικά zipties που είναι κρίσιμη απαίτηση, μερικά απογυμνωμένα χάλκινα καλώδια, θερμή κόλλα για το στήσιμο του Project καθώς και ένα κομμάτι χαρτόνι ή κάποιο αντίστοιχο ισχυρό υλικό για τη κατασκευή του "stand".
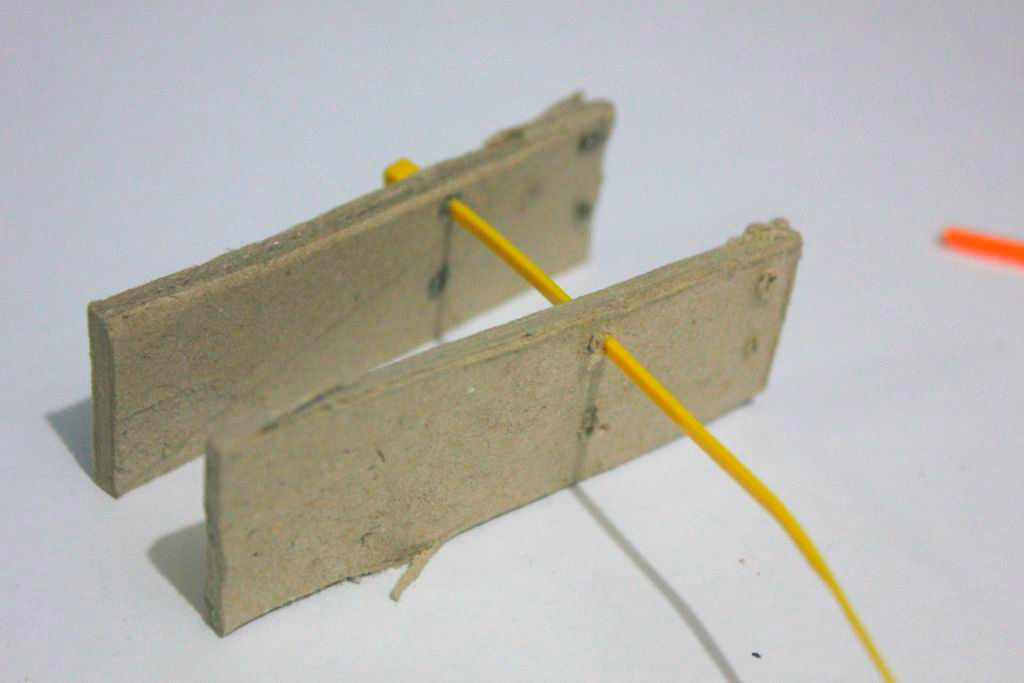
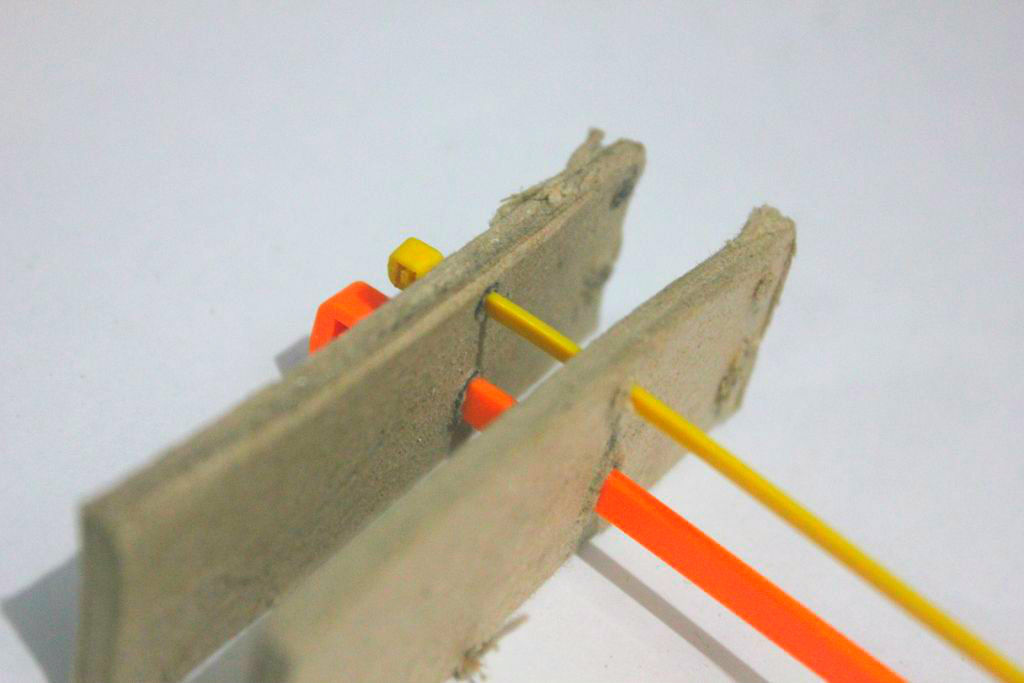
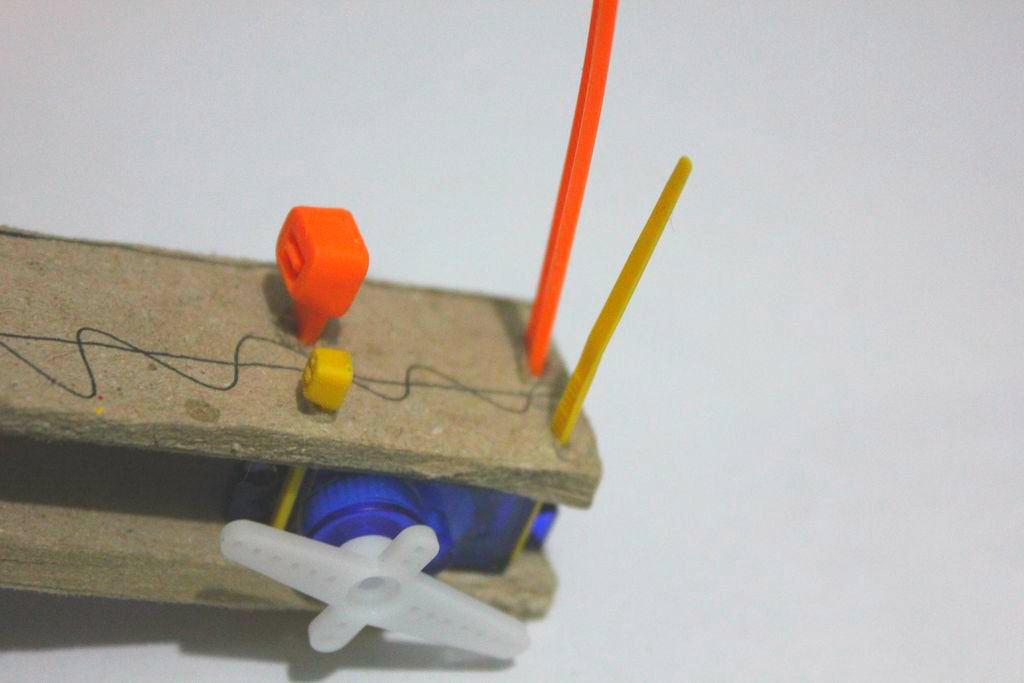
Βήμα 1. Αρχικά με ένα κοφτάκι κόβουμε περιμετρικά το σημείο όπου θα τοποθετήσουμε το servo μοτέρ. Φανταστείτε ότι θα τοποθετηθεί ανάμεσα σε δύο από αυτά τα χάρτινα κομμάτια για αυξημένη σταθερότητα και θα σταθεροποιηθεί με zipties.


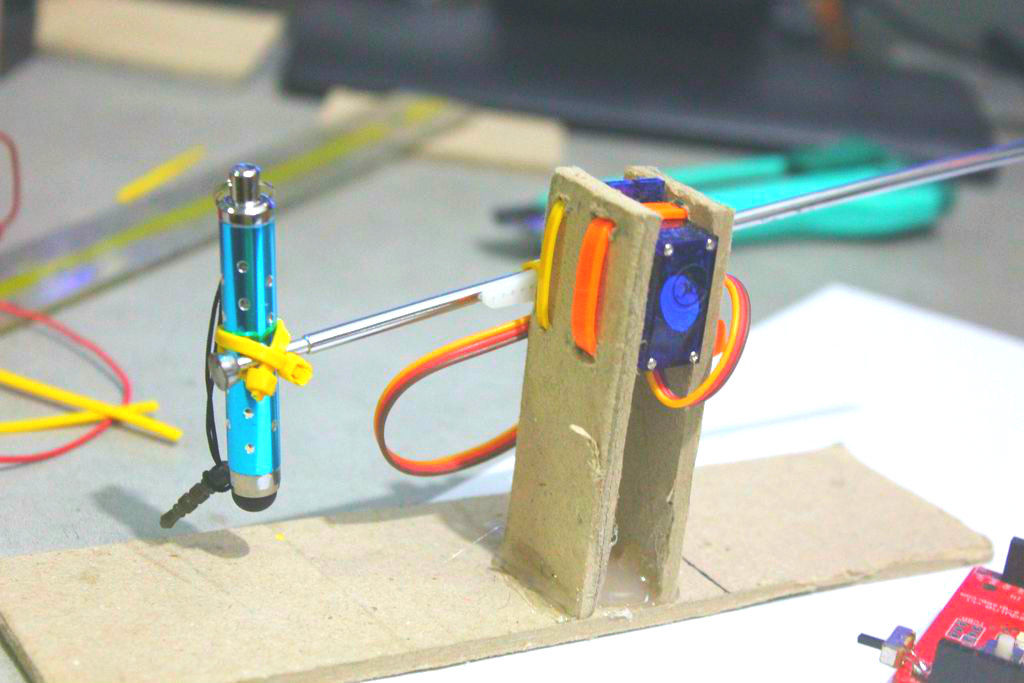
Βήμα 2. Φτιάχνουμε τη βάση στην οποία θα τοποθετηθεί το Arduino. Ύστερα το μοτέρ που βρίσκεται ανάμεσα στα δύο κομμάτια χαρτόνι θα κολληθεί κάθετα με τη βοήθεια του πιστολιού θερμής κόλλας.
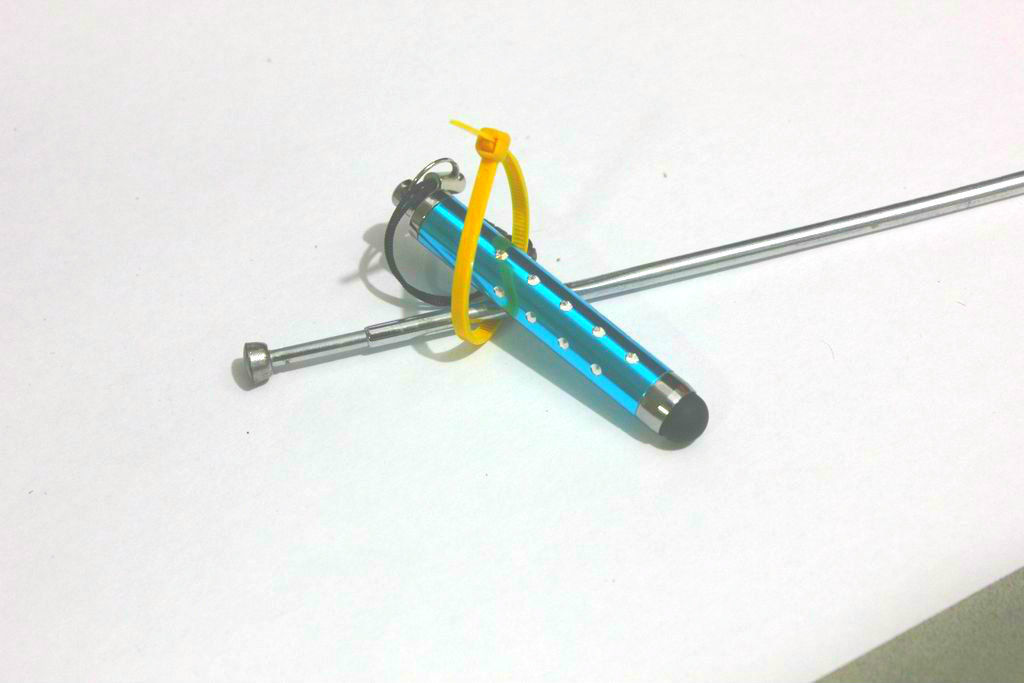
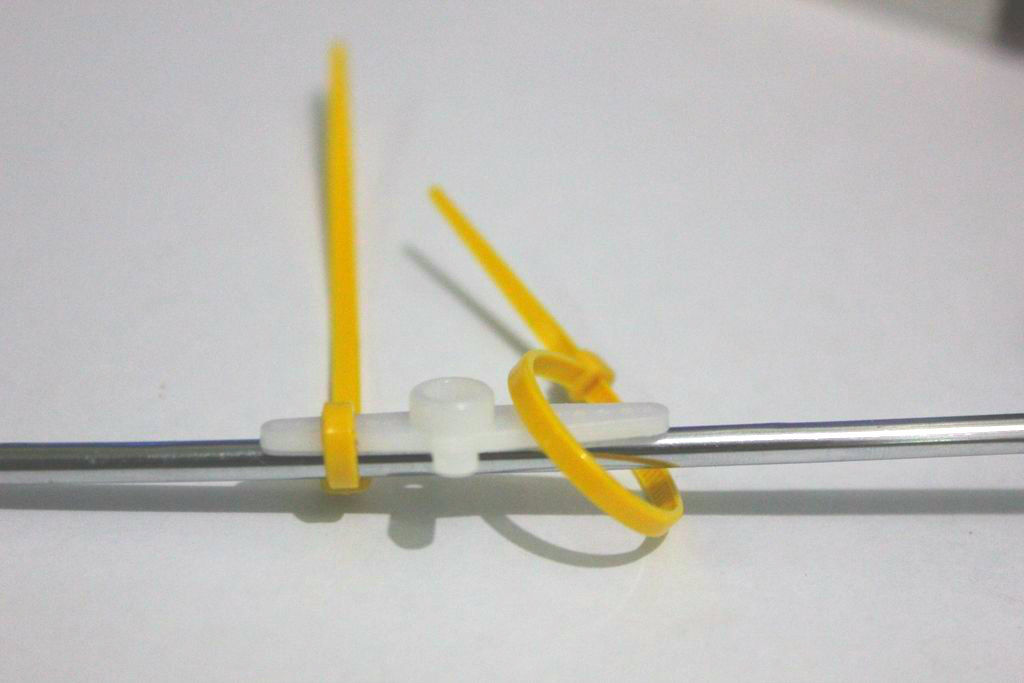
Βήμα 3. Το stylus της δοκιμής μας το τοποθετήσαμε στον βραχίονά μας, που δεν είναι τίποτα άλλο από μια απλή κεραία. Η τοποθέτησή του stylus γίνεται με τη βοήθεια μερικών ακόμα zipties σε διάταξη "X".
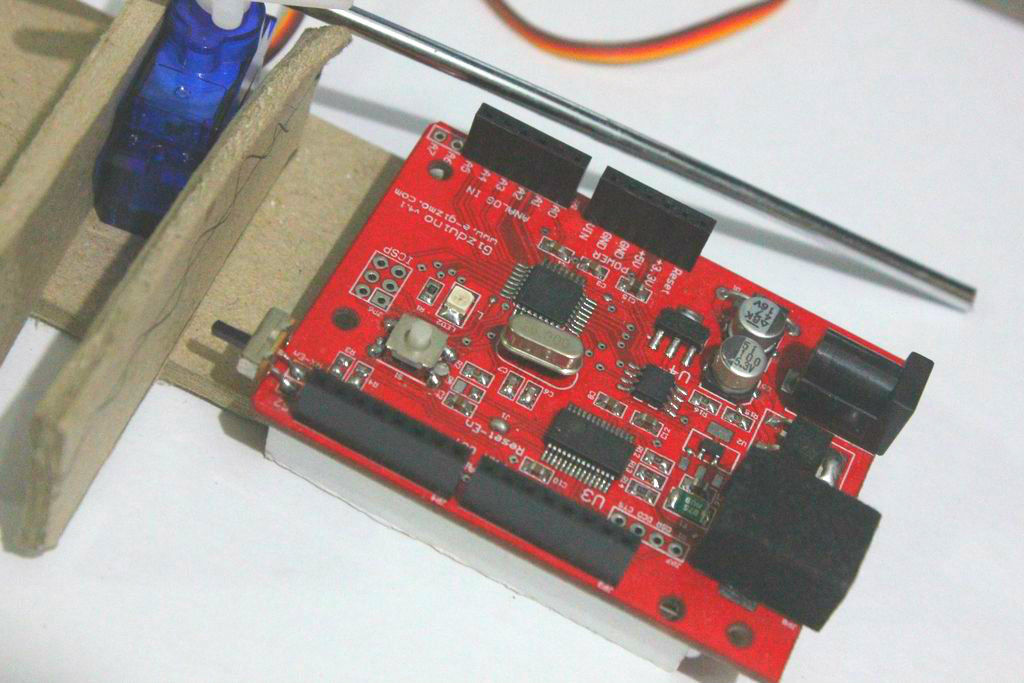
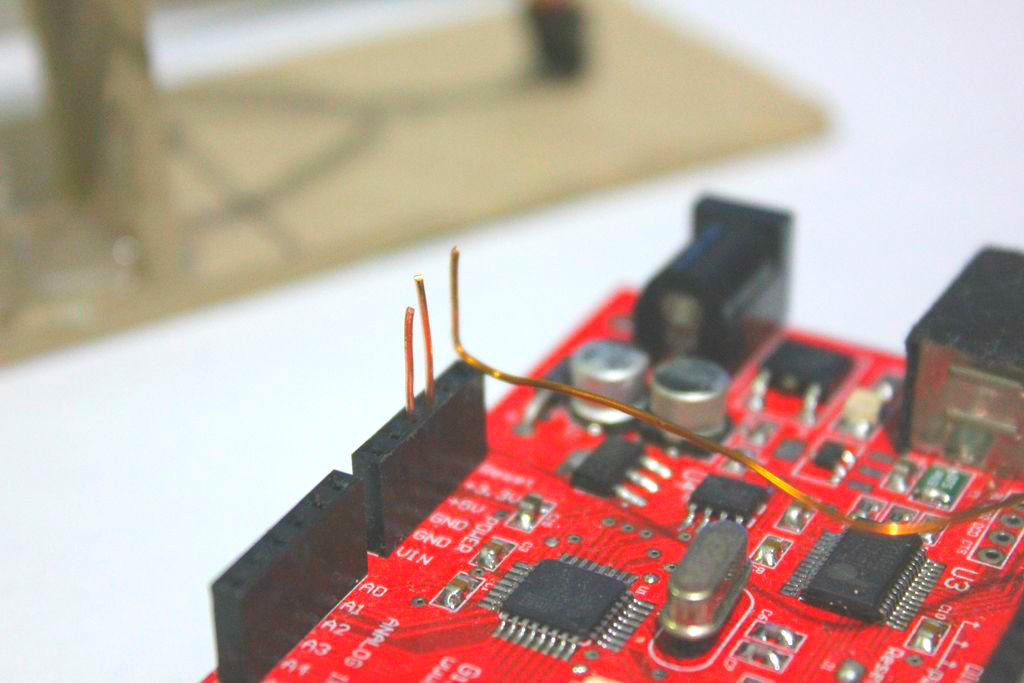
Βήμα 4. Σειρά έχει η σύνδεση του servo επάνω στο Arduino μέσω των χάλκινων καλωδίων που προαναφέραμε. Εννοείται πως μπορούν να χρησιμοποιηθούν και μονωμένα, έτοιμα καλώδια με αρσενικές απολήξεις.
Κάτι ιδιαίτερα χρήσιμο όχι μόνο στα παιχνίδια που περιγράφονται στο εν λόγω DIY, αλλά και σε διάφορες άλλες εργασίες και το μόνο εμπόδιο είναι η φαντασία του εκάστοτε ανθρώπου. Ο κύριος σκοπός του, είναι να διατηρεί κάποιο game ενεργό στο smartphone, ενώ θα μπορούσε να χρησιμοποιηθεί για να ανοίγει/κλείνει διάφορους διακόπτες, σε συγκεκριμένη χρονική στιγμή, κάτι που μπορεί να ρυθμιστεί μέσω του Arduino στο οποίο και βασίζεται. Αρχικά, εφόσον το DIY προορίζεται για χρήση με smartphone, θα χρειαστούμε κάτι το οποίο θα μπορεί να λειτουργήσει στην capacitive οθόνη αφής του τηλεφώνου, εκτός από τα standard, που είναι το servo μοτέρ, το Arduino, μερικά καλώδια, μερικά zipties που είναι κρίσιμη απαίτηση, μερικά απογυμνωμένα χάλκινα καλώδια, θερμή κόλλα για το στήσιμο του Project καθώς και ένα κομμάτι χαρτόνι ή κάποιο αντίστοιχο ισχυρό υλικό για τη κατασκευή του "stand".
Βήμα 1. Αρχικά με ένα κοφτάκι κόβουμε περιμετρικά το σημείο όπου θα τοποθετήσουμε το servo μοτέρ. Φανταστείτε ότι θα τοποθετηθεί ανάμεσα σε δύο από αυτά τα χάρτινα κομμάτια για αυξημένη σταθερότητα και θα σταθεροποιηθεί με zipties.
Βήμα 2. Φτιάχνουμε τη βάση στην οποία θα τοποθετηθεί το Arduino. Ύστερα το μοτέρ που βρίσκεται ανάμεσα στα δύο κομμάτια χαρτόνι θα κολληθεί κάθετα με τη βοήθεια του πιστολιού θερμής κόλλας.
Βήμα 3. Το stylus της δοκιμής μας το τοποθετήσαμε στον βραχίονά μας, που δεν είναι τίποτα άλλο από μια απλή κεραία. Η τοποθέτησή του stylus γίνεται με τη βοήθεια μερικών ακόμα zipties σε διάταξη "X".
Βήμα 4. Σειρά έχει η σύνδεση του servo επάνω στο Arduino μέσω των χάλκινων καλωδίων που προαναφέραμε. Εννοείται πως μπορούν να χρησιμοποιηθούν και μονωμένα, έτοιμα καλώδια με αρσενικές απολήξεις.
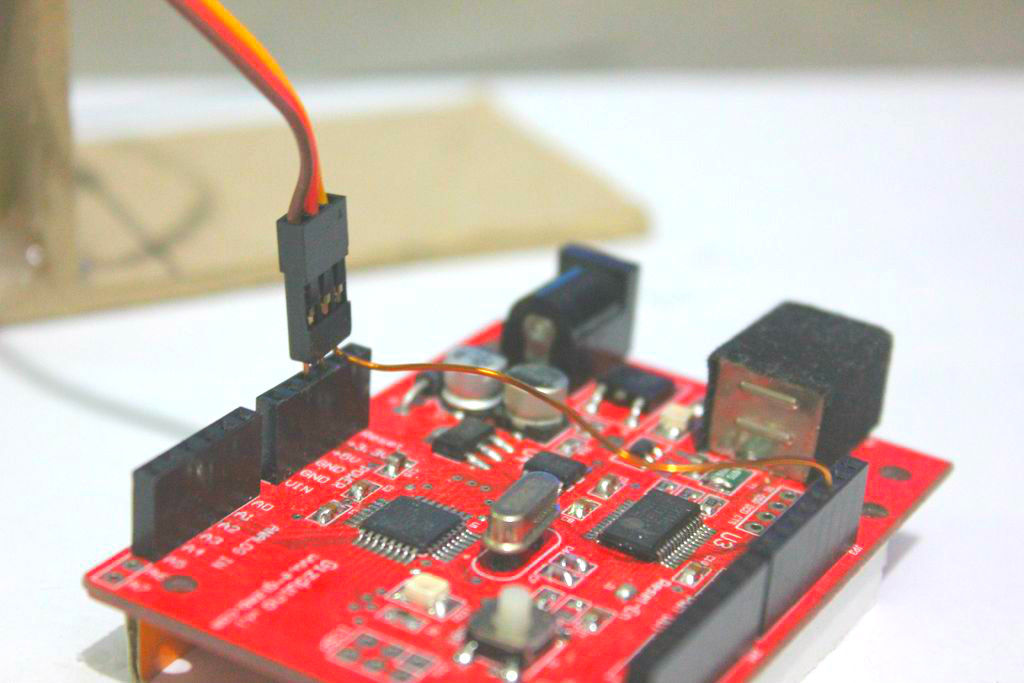
Βήμα 5. Τα δύο pins τοποθετούνται στο 5V για τροφοδοσία του μοτέρ και άλλο ένα στη γείωσή του. Τέλος, χρειαζόμαστε άλλο ένα που θα το βάλουμε στο pin 13 του Arduino.
Τέλος, σειρά έχει ο κώδικας ο οποίος μετράει τον χρόνο που το μοτέρ θα είναι αδρανές, καθώς και τον χρόνο όπου θα πιέζει την οθόνη του smartphone. Επιπλέον δίνεται η δυνατότητα ρύθμισης της κλίσης που θα έχει ο βραχίονας του αυτοματοποημένου μας ρομπότ. Για τη τροφοδοσία του χρησιμοποιούμε είτε έναν μετασχηματιστή 5V είτε τη σύνδεση USB του υπολογιστή σας.
Τέλος, σειρά έχει ο κώδικας ο οποίος μετράει τον χρόνο που το μοτέρ θα είναι αδρανές, καθώς και τον χρόνο όπου θα πιέζει την οθόνη του smartphone. Επιπλέον δίνεται η δυνατότητα ρύθμισης της κλίσης που θα έχει ο βραχίονας του αυτοματοποημένου μας ρομπότ. Για τη τροφοδοσία του χρησιμοποιούμε είτε έναν μετασχηματιστή 5V είτε τη σύνδεση USB του υπολογιστή σας.